Skip to main content
Skip to main content
 RVS 3.24 accelerates multicore software verification
RVS 3.24 accelerates multicore software verification
 Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
Rapita Systems and Avionyx Announce Strategic Partnership to Offer Best-in-class Avionics Solutions
 Rapita System Announces New Distribution Partnership with COONTEC
Rapita System Announces New Distribution Partnership with COONTEC
 Retro gaming with the Sim68020
Retro gaming with the Sim68020
 RVS gets a new timing analysis engine
RVS gets a new timing analysis engine
 How to measure stack usage through stack painting with RapiTest
How to measure stack usage through stack painting with RapiTest
 What does AMACC Rev B mean for multicore certification?
What does AMACC Rev B mean for multicore certification?
 How to achieve multicore DO-178C certification with Rapita Systems
How to achieve multicore DO-178C certification with Rapita Systems
 How to achieve DO-178C certification with Rapita Systems
How to achieve DO-178C certification with Rapita Systems
 Certifying Unmanned Aircraft Systems
Certifying Unmanned Aircraft Systems
 DO-278A Guidance: Introduction to RTCA DO-278 approval
DO-278A Guidance: Introduction to RTCA DO-278 approval
 Avionics Certification Q&A: CERT TALK
Avionics Certification Q&A: CERT TALK
 XPONENTIAL 2026
XPONENTIAL 2026
 DO-178C Multicore In-person Training (Heathrow)
DO-178C Multicore In-person Training (Heathrow)
 Avionics and Testing Innovations
Avionics and Testing Innovations










Michael Barr wrote about jitter in a recent blog posting at Embedded Gurus. Here's what Michael had to say and our alternative suggestion.
"Best Practice: The most important single factor in the amount of jitter is the relative priority of the task or ISR that implements the recurrent behavior. The higher the priority the lower the jitter. The periodic reads of those encoder pulse counts should thus typically be in a timer tick ISR rather than in an RTOS task."
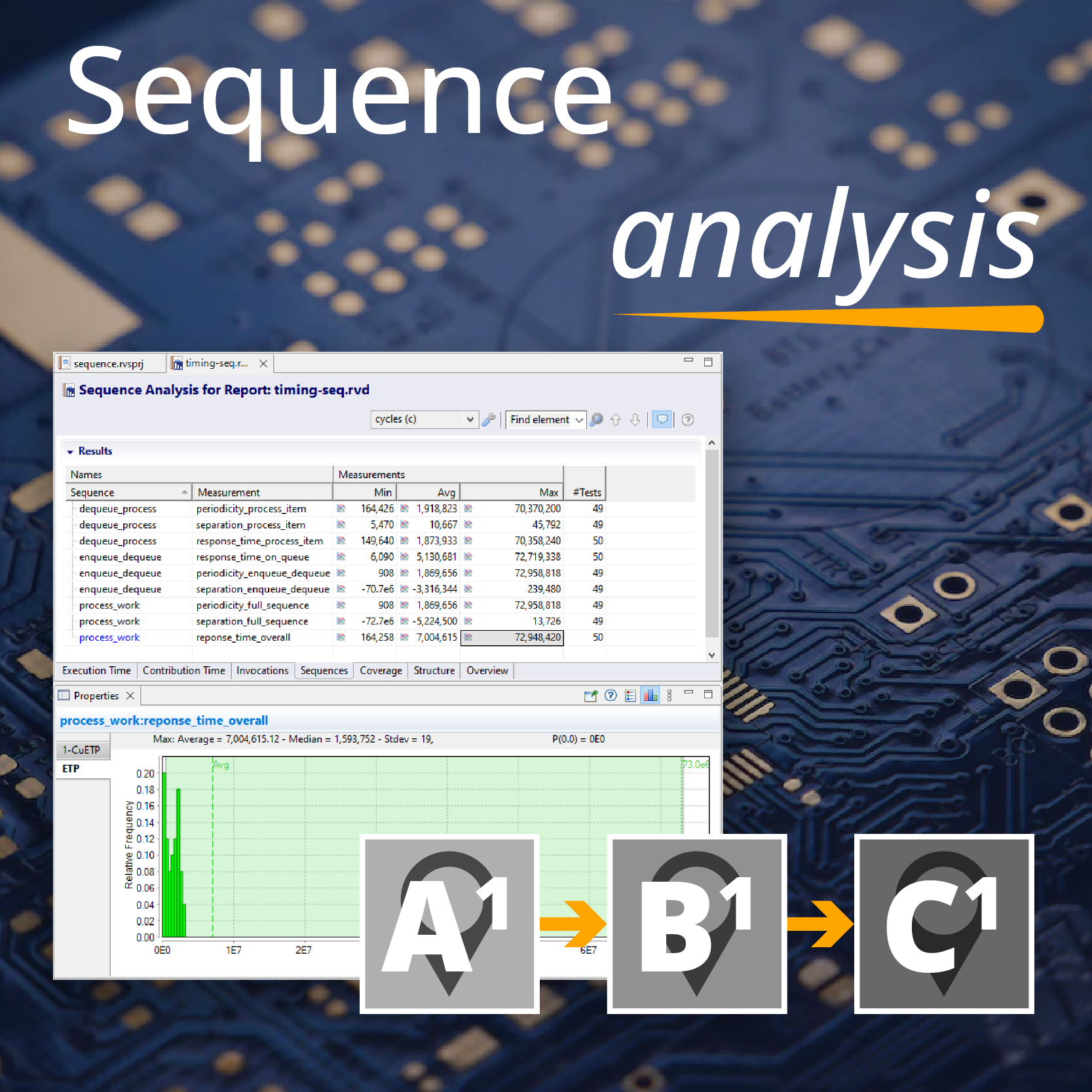
We believe jitter (the difference between longest time and shortest time) needs to be controlled for the inputs and the outputs for time-sensitive applications. This suggests an alternative to Barr’s best practice:
- Split the jitter-sensitive parts (i.e. I/O operations) from the computational parts.
- Write the I/O operations to minimize jitter. This can be done by focusing optimization on the worst case. Optimizing the worst case has the effect of reducing the difference between the maximum and minimum execution times, unlike optimizing for average case, which can have the opposite effect.
- Put the I/O operations in a high priority thread/interrupt.
- Data processing (converting inputs to outputs) can be done as a lower priority activity.
If the I/O task is triggered by a timer interrupt, the gap between interrupts gives a deadline on the lower priority execution. This should be checked for schedulability, but other than that, the completion time of the lower priority task can be variable without affecting the input and output jitter. Andrew
DO-178C webinars
White papers
Mitigation of interference in multicore processors for A(M)C 20-193

Developing DO-178C and ED-12C-certifiable multicore software
Efficient Verification Through the DO-178C Life Cycle
A Commercial Solution for Safety-Critical Multicore Timing Analysis