Skip to main content
Skip to main content
 SAIF Autonomy to use RVS to verify their groundbreaking AI platform
SAIF Autonomy to use RVS to verify their groundbreaking AI platform
 Hybrid electric pioneers, Ascendance, join Rapita Systems Trailblazer Partnership Program
Hybrid electric pioneers, Ascendance, join Rapita Systems Trailblazer Partnership Program
 Magline joins Rapita Trailblazer Partnership Program to support DO-178 Certification
Magline joins Rapita Trailblazer Partnership Program to support DO-178 Certification
 How to certify multicore processors - what is everyone asking?
How to certify multicore processors - what is everyone asking?
 Data Coupling Basics in DO-178C
Data Coupling Basics in DO-178C
 Control Coupling Basics in DO-178C
Control Coupling Basics in DO-178C
 Components in Data Coupling and Control Coupling
Components in Data Coupling and Control Coupling
 DO-278A Guidance: Introduction to RTCA DO-278 approval
DO-278A Guidance: Introduction to RTCA DO-278 approval
 ISO 26262
ISO 26262
 Data Coupling & Control Coupling
Data Coupling & Control Coupling
 Verifying additional code for DO-178C
Verifying additional code for DO-178C
 DO-178C Multicore In-person Training (Bristol)
DO-178C Multicore In-person Training (Bristol)
 XPONENTIAL 2025
XPONENTIAL 2025
 Avionics and Testing Innovations 2025
Avionics and Testing Innovations 2025
 DO-178C Multicore In-person Training (Fort Worth, TX)
DO-178C Multicore In-person Training (Fort Worth, TX)













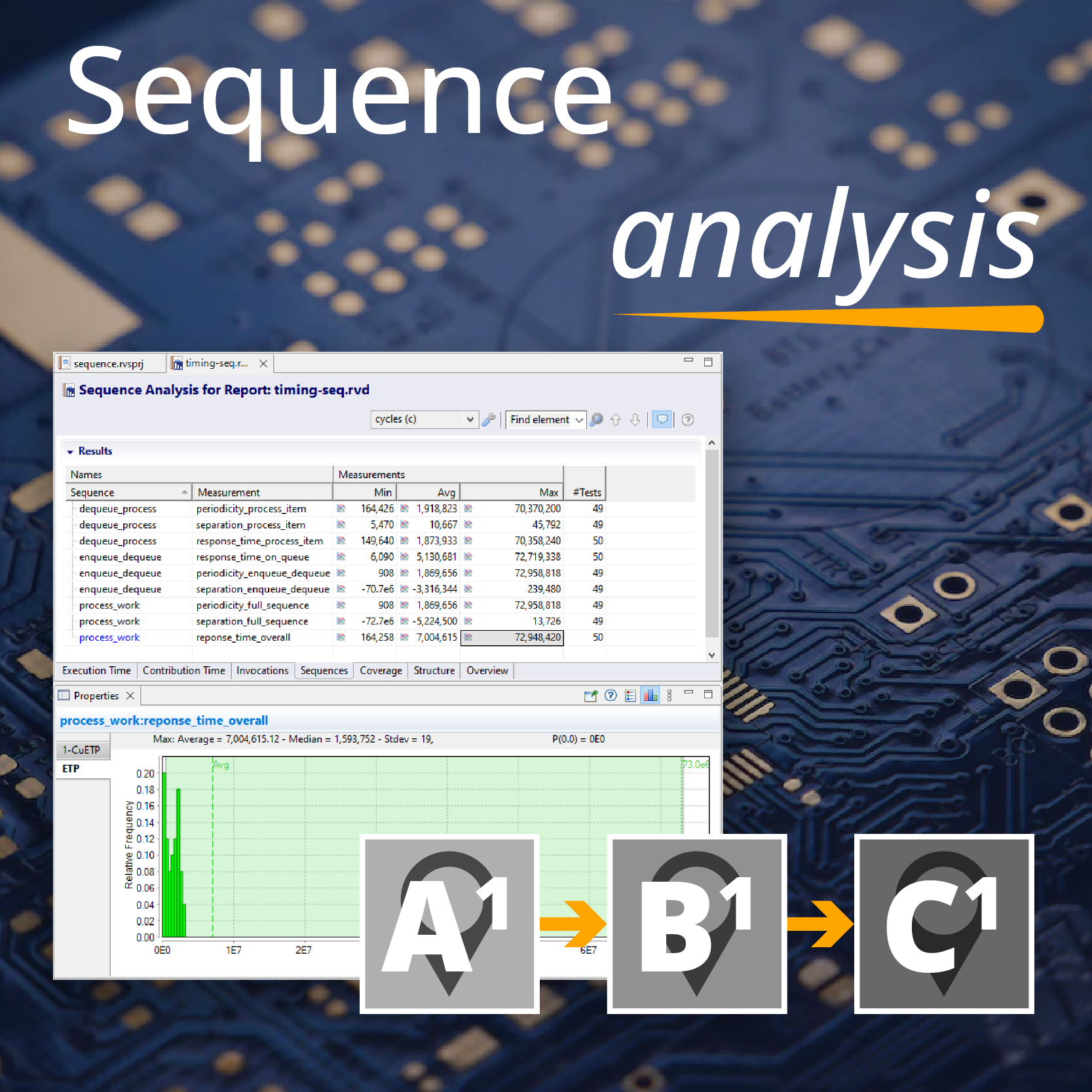
With ever more complex software and hardware in our embedded systems, it may seem that worst-case execution time analysis is something that would be left until the very end of the software lifecycle. However, finding out about temporal problems at such a late stage is usually problematic, not only because of how much commitment has been made to a particular design, but also because the changes needed to get software to meet an execution time requirement are often much bigger than the equivalent changes to meet a functional requirement.
Ideally, you should aim for much earlier investigation of the execution time behaviour. For example:
- with host-based execution, you can look at relative execution times of different parts of the software, how execution time scales in practice with the input data, and whether the same code called from different locations has vastly different execution times;
- with a modest simulator, even with only part of the software, you can look at the impact of the RTOS and application on one another. Are scheduling priorities being observed? Are tasks being released when expected? Could tasks be spread out to better even the worst-case load? The timing information also gives a good vehicle for talking about the software execution to systems engineers;
- with development hardware, you can look at the detailed schedulability, including the impact of hardware facilities on the software behaviour. Cache has a big impact, as do access latencies for different hardware devices, but different platforms all seem to have unexpected behaviours that show up clearly in the timing data.
These are just a few cases; in practice there is a continuum of different options for execution time analysis deployment, and the earlier it is introduced, the quicker you can start to control your timing uncertainty.
DO-178C webinars
White papers
 Mitigation of interference in multicore processors for A(M)C 20-193
Mitigation of interference in multicore processors for A(M)C 20-193
 Developing DO-178C and ED-12C-certifiable multicore software
Developing DO-178C and ED-12C-certifiable multicore software
 Efficient Verification Through the DO-178C Life Cycle
Efficient Verification Through the DO-178C Life Cycle
 A Commercial Solution for Safety-Critical Multicore Timing Analysis
A Commercial Solution for Safety-Critical Multicore Timing Analysis