Skip to main content
Skip to main content
 SAIF Autonomy to use RVS to verify their groundbreaking AI platform
SAIF Autonomy to use RVS to verify their groundbreaking AI platform
 Hybrid electric pioneers, Ascendance, join Rapita Systems Trailblazer Partnership Program
Hybrid electric pioneers, Ascendance, join Rapita Systems Trailblazer Partnership Program
 Magline joins Rapita Trailblazer Partnership Program to support DO-178 Certification
Magline joins Rapita Trailblazer Partnership Program to support DO-178 Certification
 How to certify multicore processors - what is everyone asking?
How to certify multicore processors - what is everyone asking?
 Data Coupling Basics in DO-178C
Data Coupling Basics in DO-178C
 Control Coupling Basics in DO-178C
Control Coupling Basics in DO-178C
 Components in Data Coupling and Control Coupling
Components in Data Coupling and Control Coupling
 DO-278A Guidance: Introduction to RTCA DO-278 approval
DO-278A Guidance: Introduction to RTCA DO-278 approval
 ISO 26262
ISO 26262
 Data Coupling & Control Coupling
Data Coupling & Control Coupling
 Verifying additional code for DO-178C
Verifying additional code for DO-178C
 DO-178C Multicore In-person Training (Bristol)
DO-178C Multicore In-person Training (Bristol)
 XPONENTIAL 2025
XPONENTIAL 2025
 Avionics and Testing Innovations 2025
Avionics and Testing Innovations 2025
 DO-178C Multicore In-person Training (Fort Worth, TX)
DO-178C Multicore In-person Training (Fort Worth, TX)













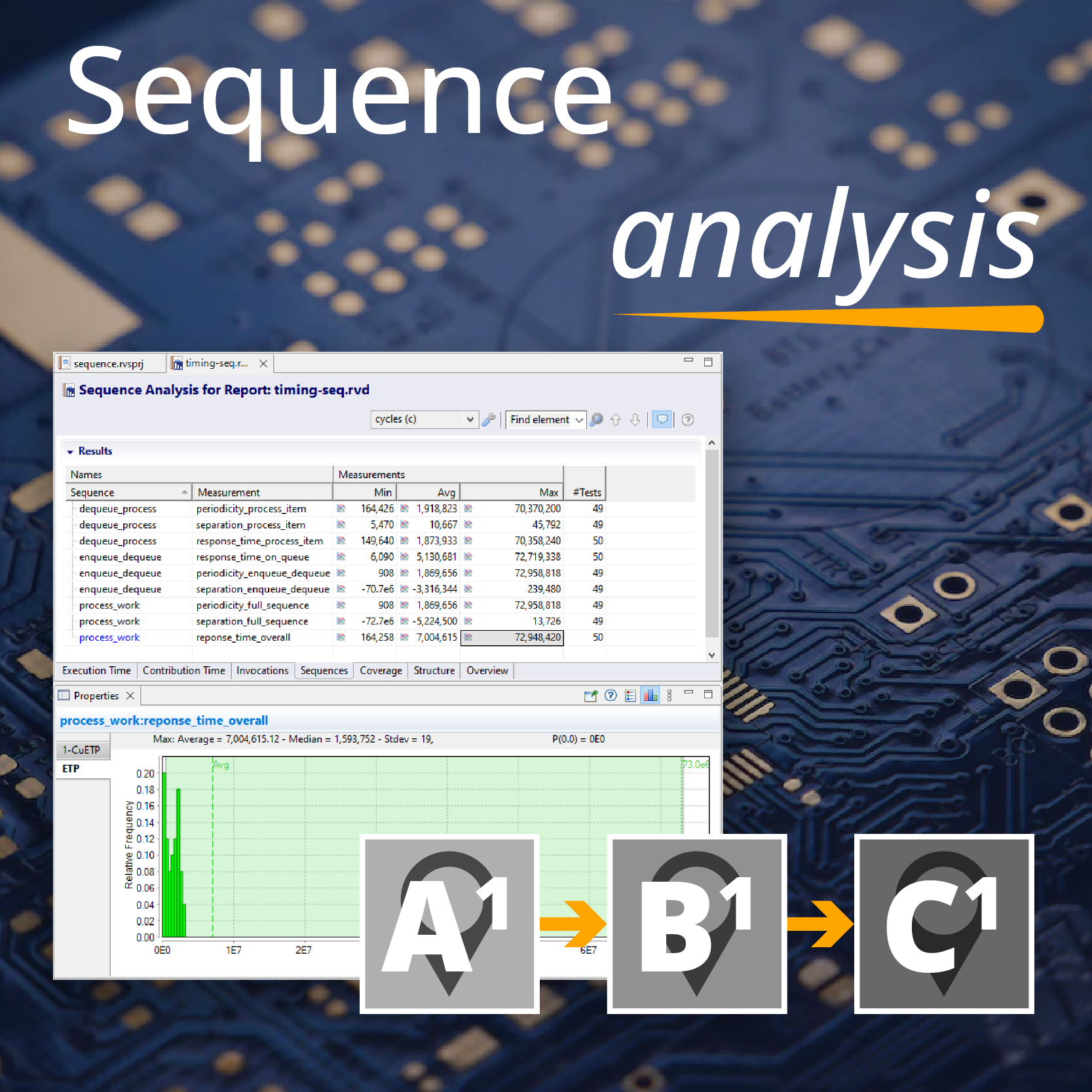
In embedded systems the functionality of software is usually tied in some way to timing deadlines. Specifying systems when there are many software components working together can be challenging or impossible. Many customers we have worked with would like to be able to specify things more accurately during the requirements stage of system design.
Timed Finite Automata is one of the notation options available to them. Timed Finite Automata are very similar to a Deterministic Finite Automaton, in that they contain a finite number of states and a number of transitions between those states (including cyclical transitions).

Figure 1: Deterministic Finite Automaton (DFA)
This is an example of a Deterministic Finite Automaton. Transitions leading to the green ‘OK’ state are allowed, transitions leading to the red ‘NOK’ state are erroneous.
TFA allows additional timing constraints to be added to the transitions, as shown in the diagram below:

Figure 2: Timed Finite Automata (TFA)
In this example the transition from S1 to S2 now needs to happen in less than 10 time units. In this notation T is the current time and S1.T is the time recorded on entry to the S1 state. If this transition happens in less than 10 units of time and is followed by the ‘C’ input then the OK state will be reached. However, if the transition takes more than 10, or is not followed by ‘C’ then NOK state will be reached.
At the requirements or design stage of a project this can be used to assign budgets to software components. Pairing timing budgets in specifications with the use of RapiTime will help identify potential timing pinch points much earlier in the development process. Being made aware of these issues and the need for optimisation or a more powerful microprocessor long before the integration stage will certainly help keep the costs of such mistakes down.
This work is part of research performed within the PRESTO project (ARTEMIS-2010-1-269362), a research project co-funded by the European Commission under the ARTEMIS Joint Undertaking Programme. More information can be found at http://www.presto-embedded.eu/.
DO-178C webinars
White papers
 Mitigation of interference in multicore processors for A(M)C 20-193
Mitigation of interference in multicore processors for A(M)C 20-193
 Developing DO-178C and ED-12C-certifiable multicore software
Developing DO-178C and ED-12C-certifiable multicore software
 Efficient Verification Through the DO-178C Life Cycle
Efficient Verification Through the DO-178C Life Cycle
 A Commercial Solution for Safety-Critical Multicore Timing Analysis
A Commercial Solution for Safety-Critical Multicore Timing Analysis